
近日,j9九游会官方网页版振动、冲击、噪声研究所张文明教授团队在学术期刊The Innovation(影响因子33.1)上发表了题为“An intelligent spinal soft robot with self-sensing adaptability”的研究论文,提出了一种具有自感知-适应能力的软体机器人,利用正逆压电效应,设计了具有“传感-驱动”功能一体化集成的仿生脊椎,赋予了软体机器人一定的运动能力和对不同环境的感知能力。博士生巩守禄和房付熠为论文第一作者,易志然助理研究员、邵磊副教授和张文明教授是共同通讯作者。
环境适应性是软体机器人实现高效运动的重要特征。然而,现有软体机器人的感知系统与驱动系统相对独立,存在本征的感驱信息误差,使得两者协同控制效果受限。设计和开发一种像生物体一样具有独立决策和自发调节能力的智能软体机器人仍颇具挑战。针对上述问题,课题组仿照生物体运动器官—脊椎和软组织肌肉,利用压电效应的可逆性,设计了感驱一体的仿生脊椎,利用气动折纸驱动器作为人工肌肉,实现了一种具有自我感知适应能力的智能软体机器人。该仿生脊椎利用可逆的物理效应,能够为软体机器人提供躯干支撑、驱动辅助和感知调节等功能。
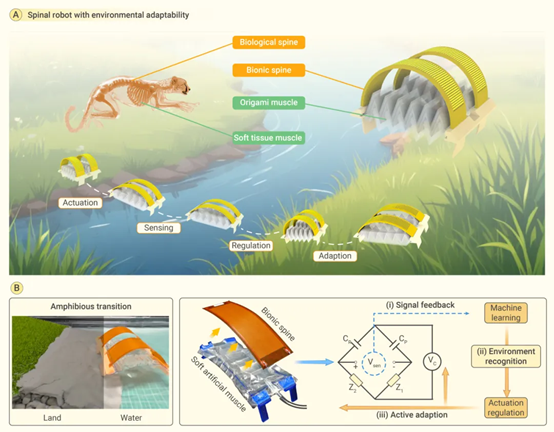
具有“环境感知—自适应”能力的仿生脊椎软体机器人
在“自感知—适应”能力的作用下,仿生脊椎软体机器人能够流畅地完成从环境识别、自我决策到主动调节的闭环工作流程,从而高效地完成任务。为了验证仿生脊椎的可靠性,本文设计了一个具有全向运动以及自我避障意识的软体两栖机器人。通过调节机器人的运动姿态以及人工肌肉间的协同驱动能够控制机器人实现前进、后退以及转向运动。机器人展示出对于障碍物的感知与规避能力,以及在水陆两栖多地形任务中的较高效率,验证了仿生脊椎设计的可拓展性以及功能元件和系统的高简洁性。
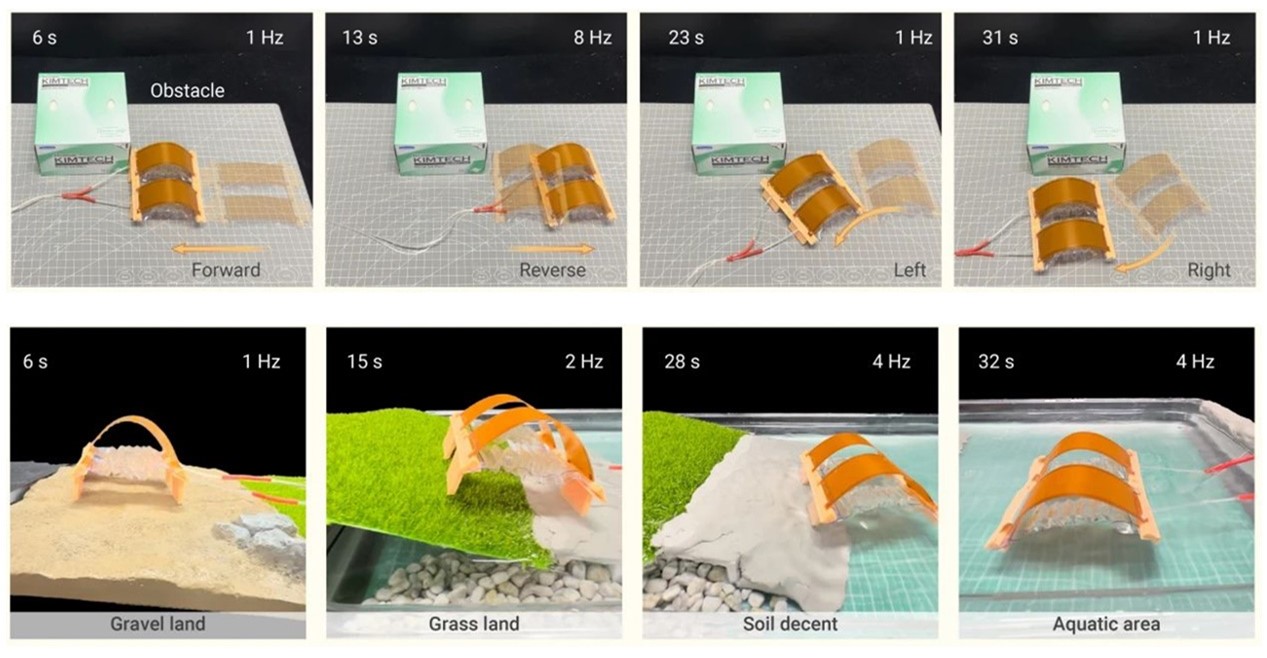
仿生脊椎软体机器人执行避障及水陆两栖多地形任务
具有协同效应的感驱一体仿生脊椎不仅最大程度上减少了系统冗余,还构建了从感知识别到决策响应之间的桥梁。该研究能有效激发未来高智能、全天候、低成本的智能软体机器人研发。
该研究获得了国家自然科学基金、上海市科技创新行动计划等课题的资助。
